
Fundamentos de Biomecánica– Parte 4
Raúl
Amil
4.1.
Masa
Definimos como masa
a la cantidad de materia que contiene un cuerpo. La materia es la sustancia que ocupa espacio, mientras que un cuerpo
es materia limitada por una superficie cerrada.
4.1.1
Masa gravitatoria
Es
la propiedad que tiene un cuerpo de ejercer una atracción sobre otro. La fuerza
de atracción resultante será directamente proporcional a las masas de dichos
cuerpos, e inversamente proporcional al cuadrado de la distancia que los separa
(ley de Newton de la gravitación universal). Las fuerzas de gravitación son
parejas de acción y reacción. Por ejemplo, cuando un saltador efectúa su
batida, la tierra ejerce una fuerza de atracción sobre él, y en la misma
dirección y sentido contrario, el saltador ejerce una fuerza igual y contraria.
El saltador termina cayendo dada la diferencia de masa con la terrestre (masa de
la tierra: 5.98 x 1024 Kg; masa de un hombre promedio: 7.5 x 101
Kg).
4.1.2.
Masa inercial
Para
acelerar un cuerpo cualquiera debemos imprimirle una fuerza determinada, la cual
es proporcional a su masa. A esta masa, independiente del campo gravitatorio
terrestre, se la denomina inercial. Es importante destacar que si bien la masa
gravitatoria y la inercial son conceptualmente diferentes, experimentalmente
coinciden, por lo cual durante muchos años se pensó que era una casualidad.
Sin embargo, esta equivalencia condujo al desarrollo de la teoría general de la
relatividad.
4.2.
Fuerza
Es
toda acción que tiende a variar el estado de movimiento o de reposo de un
cuerpo. En el cuerpo humano las fuerzas son desarrolladas por los músculos, los
cuales tiran desde los puntos de inserción para producir movimiento. Dado que
para definir una fuerza además de su valor absoluto necesitamos conocer su
dirección y sentido, las fuerzas son
cantidades vectoriales. La unidad utilizada por el Sistema Internacional es
el Newton que representa la fuerza que hay que imprimirle a una masa de 1Kg para
acelerarla 1m/s2.
4.2.1.
Peso
El
peso de un cuerpo es la fuerza
gravitacional que ejerce la tierra sobre él. En la vida diaria utilizamos
como unidad de peso al Kg, pero se debe aclarar que este Kg es un kilogramo fuerza, y equivale a 9.81N.
4.2.2.
Fuerzas internas y fuerzas externas
En
Biomecánica se suelen considerar a las partes constituyentes del cuerpo humano
como un sistema, y cualquier fuerza que una parte de este ejerza sobre otra, es
considerada una fuerza interna. Por
ejemplo, cuando un músculo se contrae y genera un esfuerzo sobre su punto de
inserción, esta fuerza es considerada interna. Por el contrario, la fuerza
gravitatoria, la resistencia aerodinámica, las fuerzas que se ejercen contra el
suelo, o contra otro cuerpo, son consideradas fuerzas externas.
4.3.
Leyes de Newton de la Mecánica
4.3.1.
Primera Ley de Newton
Esta
ley también es llamada “principio de inercia”, y su enunciado es el
siguiente: “Todo cuerpo conserva su
estado de reposo o de movimiento rectilíneo uniforme, a menos que se vea
obligado a cambiar ese estado por fuerzas externas que se le apliquen”.
4.3.2.
Segunda Ley de Newton
Se
la suele denominar como la “ecuación fundamental de la Mecánica” y se
expresa: “La resultante de las fuerzas
que actúan sobre un cuerpo de masa m, es directamente proporcional y tiene la
misma dirección y sentido que la aceleración que produce”.
F
= m.a (1)
De dicha expresión podemos deducir que el aumento
de velocidad, ya sea de un implemento de atletismo, de una pelota, o del
centro de gravedad del cuerpo humano, requerirá la aparición de una
determinada aceleración, la cual
dependerá en forma directamente
proporcional a la fuerza que la origine. Dicho en forma más sencilla, a
mayor fuerza, mayor aceleración (obviamente mientras la masa permanezca
constante).
Si la
expresión (1) se la escribe: a = F/m,
podemos deducir también que la aceleración producida por una fuerza dada, es
inversamente proporcional a la masa del cuerpo. O sea que cuanto mayor sea la
masa de un cuerpo, mayor será la fuerza necesaria para acelerarlo.
4.3.3.
Tercera Ley de Newton
Esta propiedad de las fuerzas es conocida como “principio
de acción y reacción”, y se enuncia: “A
toda acción se le opone una reacción de igual intensidad y dirección, pero de
sentido contrario”.
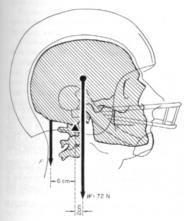
En las
figuras podemos apreciar ejemplos de esta ley en tres diferentes disciplinas
deportivas.
|
de “The Biomechanics of Sports Techniques, de Hay")
4.4.
Rozamiento
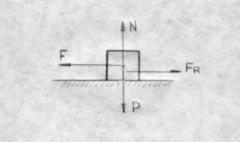
Supongamos
un bloque de peso P apoyado sobre el
suelo. Si analizamos las fuerzas que actúan sobre este sistema (bloque-suelo),
podemos decir que a la fuerza P, se
la opone la reacción normal N del
suelo que lo soporta. Bajo la acción de estas dos fuerzas el bloque tiende a
permanecer en reposo.
 |
Ahora, si en dirección paralela al suelo comenzamos a aplicar una fuerza muy pequeña en relación a la masa del mismo, el bloque permanecerá en reposo. Esto es debido al rozamiento existente entre la superficie del bloque y la del suelo. A las fuerzas de rozamiento que obran entre superficies que se encuentran en reposo una con respecto a otra se las denominan fuerzas de rozamiento estático, y dependen de la naturaleza de las superficies en contacto. Si comenzamos a aumentar gradualmente el valor de dicha fuerza, notaremos que en un momento determinado, el bloque empezará a moverse. La mínima fuerza que origina el movimiento es igual a la máxima fuerza de rozamiento estático.
 |
a
expresión de la fuerza de rozamiento es:
Fre
< me.N
Donde me
es el llamado coeficiente de rozamiento estático. Es importante destacar que las
fuerzas de rozamiento siempre se
oponen al movimiento.
Una vez
comenzado el movimiento, las fuerzas de rozamiento que obran entre las
superficies disminuyen, por lo cual para mantener dicho movimiento se necesita
una fuerza menor. A las fuerzas de rozamiento que obran entre superficies que se
mueven se las denomina fuerzas de rozamiento cinético y responden a la expresión:
Frc
= mc.N
donde mc
es el llamado coeficiente de rozamiento cinético.
Existe un tercer tipo de fuerzas de rozamiento llamadas fuerzas de rozamiento de rodadura las cuales se originan por la
deformación de las superficies en contacto. La expresión correspondiente a
ellas es:
Frr
= mr.N
donde mr
es el llamado coeficiente de rozamiento de rodadura.
4.5.
Impulso y Cantidad de movimiento
Partiendo de la
Segunda Ley de Newton podemos definir dos conceptos importantes para el análisis
del movimiento deportivo, como son el impulso y la cantidad de
movimiento que posee un cuerpo.
Supongamos que analizamos a un lanzador de bala durante la
ejecución de un lanzamiento, y que este se realiza sobre una plataforma
especial que permite medir la intensidad y registrar el tiempo durante el cual
actúan las fuerzas que se ejercen contra ella.
En la figura podemos observar el registro de las componentes
horizontales de las fuerzas que se ejercen contra el suelo, considerando como
positivas a aquellas que tienen la dirección del lanzamiento, y negativas en
caso contrario.
 |
(de
“The Biomechanics of Sports Techniques, de Hay")
Si observamos el registro notamos la variación de la fuerza en los diferentes
intervalos de tiempo. A la integral de una fuerza en el intervalo de tiempo que
ella actúa se lo denomina impulso.
t2
J=
ò
F dt
t1
De la expresión anterior podemos deducir que el impulso está representado por
el área bajo la curva limitada por los instantes de tiempo definidos.
Aplicando
la Segunda Ley de Newton podemos llegar a encontrar una interesante relación:
Recordando que:
F = m.a
donde F representa la fuerza media ejercida en un intervalo de tiempo Dt
= tf-ti , en el cual podemos considerar a ti=0, y a
representa la aceleración media, la cual puede ser reemplazada por:
a
= (vf – vi)/t
Reemplazando en la anterior tenemos que:
F
= m(vf – vi)/t
Pasando t al otro lado de la igualdad y eliminando el paréntesis
obtenemos
Ft
= mvf – mvi
La expresión anterior implica que el
impulso de una fuerza es igual a la variedad de cantidad de movimiento que esta
produce.
Cabe aclarar que en cierta bibliografía a la variación de la cantidad de movimiento se la conoce como momentum.
4.5.1. Conservación
de la cantidad de movimiento durante los choques
Los choques son
una situación muy común en la actividad deportiva. Por ejemplo cuando un
futbolista impacta una pelota, la fuerza ejercida por el pié contra la pelota
es igual y contraria a la que ejerce la pelota contra el pié (Tercera Ley de
Newton). El tiempo que durante el cual actúan dichas fuerzas es también idéntico.
Dado que el impulso de una fuerza es igual al producto de dicha fuerza por el
tiempo durante el cual actúa, podemos deducir que el impulso que la fuerza del
pié ejerce sobre la pelota es igual y contrario al que la pelota recibe, por lo
tanto también ocurrirá lo mismo con la cantidad de movimiento.
Expresando esto último algebraicamente:
mvf1
– mvi1 = -(mvf2
– mvi2)
Pasando el segundo término de la igualdad al primero:
(mvf1
– mvi1) + (mvf2
– mvi2) = 0
La anterior expresa el principio de la conservación
de la cantidad de movimiento que dice: en
un sistema en el cual los cuerpos chocan, la variación de la cantidad de
movimiento permanece constante, a menos que sobre dicho sistema actúen fuerzas
externas.
En realidad, en cualquier situación de choque siempre actúa alguna
fuerza externa, como la fuerza de gravedad. El principio de la cantidad de
movimiento es aplicable a los choques, siempre
que el tiempo que dure el choque sea lo suficientemente pequeño, de manera
que se pueda despreciar la influencia de dicha fuerza. En la práctica deportiva
los choques más usuales como el de una raqueta, el de un bate, o el de un pié
contra una pelota, siempre duran un instante de tiempo muy pequeño.
4.6.
Dinámica del movimiento de rotación
La dinámica del
movimiento de rotación presenta una analogía con la de traslación, sin
embargo hay diferencias importantes que destacar.
En primera instancia debemos encontrar un equivalente a la
fuerza, dado que un cuerpo girará con diferente aceleración angular según
donde sea el punto de aplicación de dicha fuerza. Por ejemplo, una puerta tendrá
una determinada aceleración angular si la fuerza se ejerce en el lugar de la
manija, una menor si la ejercemos en el medio, y no habrá aceleración angular
si el punto de aplicación de dicha fuerza coincide con el eje de la bisagra.
Llamaremos momento de rotación o momento
de la fuerza al concepto rotacional análogo al concepto de fuerza.
Muchos de los conceptos que enunciaremos los referiremos a
una partícula elemental, pero son extensibles a los cuerpos
rígidos, los cuales se pueden considerar como sistemas
de partículas que no modifican su posición unas con respecto a otras.
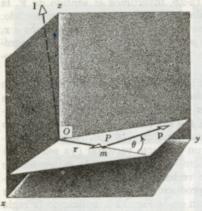
4.6.1.
Momento de rotación
Sea una fuerza F
que actúa sobre una partícula P cuya posición con respecto al origen de un
sistema inercial está dada por el vector posición r.
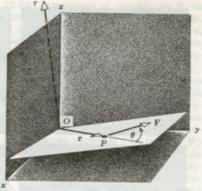 |
(de
Física I, de Resnick y Halliday)
El momento de rotación t
que actúa sobre la partícula con respecto al origen O, se define como el producto
vectorial entre el vector posición r
y la fuerza F.
t
= r x F
La unidad en la que expresamos el momento de rotación es Nm.
Como vemos, la fuerza P tiende a producir un giro del cuerpo
alrededor del punto O en el sentido de las agujas del reloj. Por convención el
momento se considera (+) cuando el sentido de giro coincida con el de las agujas
del reloj, y (–) en caso contrario.
4.6.2.
Cupla o par de fuerzas
Al sistema
constituido por dos fuerzas de igual
intensidad, sentido contrario, y rectas de acción paralelas se lo denomina cupla
o par de fuerzas. Al producto de la intensidad P por la distancia d que
separa ambas fuerzas lo denominaremos momento
de la cupla o torque.
4.7
Sistemas de Palancas
Se denomina palanca
a una barra ideal rígida que puede girar
en torno a un punto de apoyo fijo
ideal llamado pivote. La longitud de
la palanca entre el pivote y el punto de aplicación de la resistencia se llama
brazo de resistencia, y la longitud entre el pivote y el punto de aplicación de
la fuerza se llama brazo de fuerza.
La ventaja mecánica de una palanca es la relación entre la
longitud del brazo de fuerza y la del brazo de resistencia. La función usual de
una palanca es obtener una ventaja mecánica de modo que una pequeña fuerza
aplicada en un extremo de una palanca a gran distancia del pivote, produzca una
fuerza mayor que opere a una distancia más corta del pivote en el otro, o bien
que un movimiento aplicado en un extremo produzca un movimiento mucho más rápido
en el otro.
Existen
tres tipos de palancas, clasificables según las posiciones relativas de la
fuerza y la resistencia con respecto al pivote. En el cuerpo humano, el punto de
apoyo está ubicado en la articulación que produce el movimiento; la fuerza es
generada por los músculos y la resistencia representa la carga a vencer o a
equilibrar.
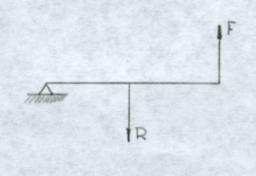
4.7.1.
Palanca de primer grado
El punto de
apoyo se halla entre la fuerza y la resistencia. También se la llama palanca de
equilibrio.
 |
(de
“The Biomechanics of Sports Techniques, de Hay")
Palanca de segundo grado: La resistencia se ubica entre el pivote y la fuerza. También se la denomina palanca de fuerza porque el brazo de fuerza es mayor que el brazo de resistencia. Son escasas en el cuerpo humano.
 |
Palanca de tercer grado: La fuerza se ubica entre el punto de apoyo y la resistencia. También se la denomina palanca de velocidad y son las más abundantes en el cuerpo humano.
 |
 |
||
(de
“The Biomechanics of Sports Techniques, de Hay")
4.7.2. Cantidad de
movimiento angular de una partícula
Sea una partícula
de masa m, y cantidad de movimiento
lineal p
= mv en una posición r con
respecto al origen O de un sistema de referencia inercial.
Definimos como cantidad
de movimiento angular l de la
partícula con respecto al origen O, al producto vectorial del vector posición
por el vector cantidad de movimiento lineal.
l = r x p
 |
(de
Física I, de Resnick y Halliday)
La unidad para la cantidad de movimiento angular es
Kgm2/s.
4.7.3. Momento de
inercia
Consideremos un
cuerpo rígido que rota alrededor de un eje fijo en un sistema de referencia
inercial con una velocidad angular w.
Si bien dicha velocidad angular es la misma para todas las partículas que lo
componen, el radio de giro puede ser diferente para cada una de ellas.
A la sumatoria de los productos de las masas de cada una de las partículas
y los radios elevados al cuadrado con respecto al eje de rotación se lo
denomina momento de inercia o inercia
rotacional.
I
= åm.r2
Es importante destacar que el momento de inercia de un
cuerpo depende del eje con respecto al cual está girando así como de la forma
del cuerpo y de la manera que está distribuida su masa.
El momento de inercia se expresa en kgm2.
Se puede demostrar una interesante relación entre el momento de inercia
I de un cuerpo con respecto a un eje cualquiera y su momento de inercia Icm
con respecto a un eje paralelo que pasa por su centro de masa (concepto que veremos más adelante). Si M es la masa
total del cuerpo y h la distancia
entre los dos ejes tenemos que:
I
= Icm + Mh2
También se puede demostrar la relación entre la
cantidad de movimiento angular l, la velocidad angular w,
y el momento de inercia I:
l
= Iw
![]()
